-
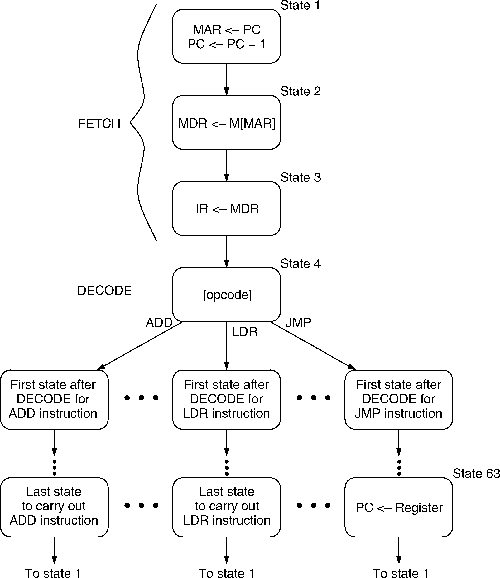
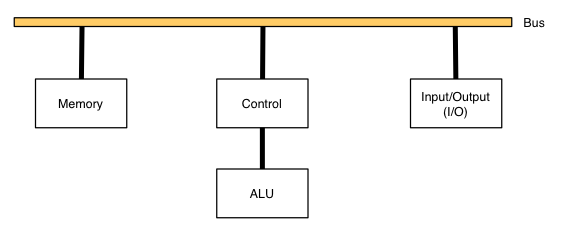
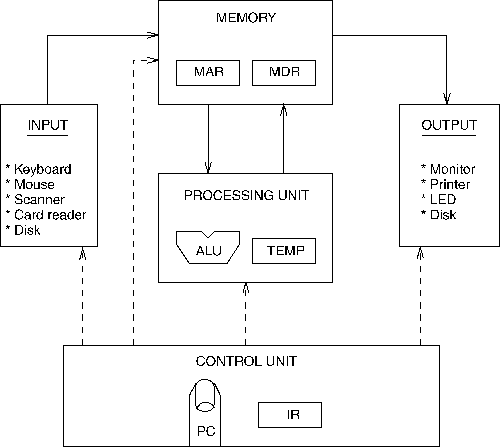
Instructions are processed under direction of the control unit in step-by-step manner.
-
Each step is referred to as a phase.
-
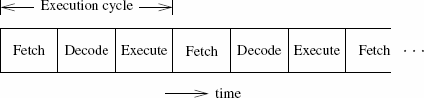
There are six fundamental phases of the instruction cycle:
-
fetch instruction (aka pre-fetch)
-
decode instruction
-
evaluate address (address generation)
-
fetch operands (read memory data)
-
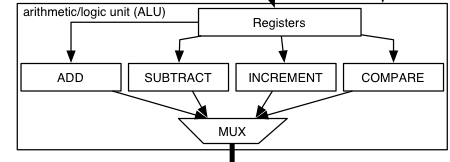
execute (ALU access)
-
store result (writeback memory data)
-
-
Instruction cycle:
-
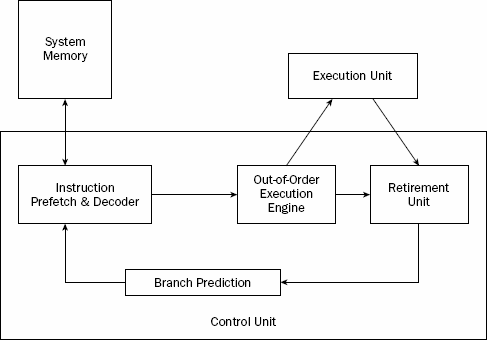
Pentium 4 instruction cycle: