-
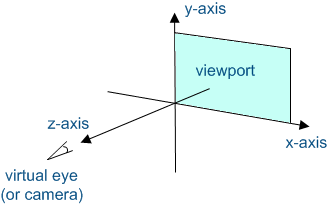
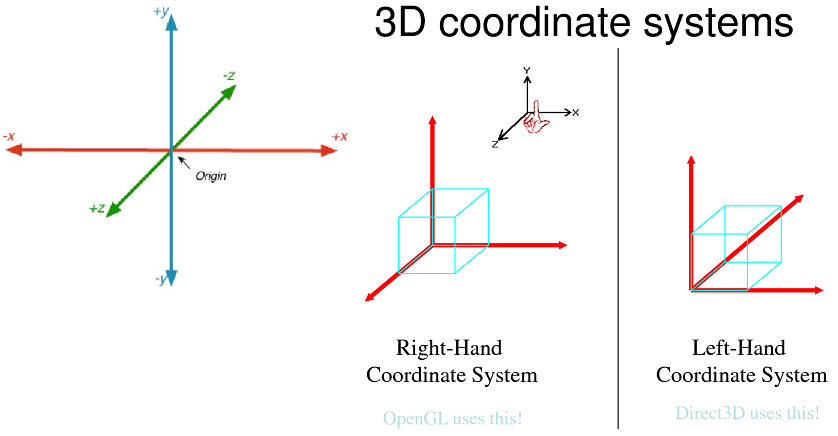
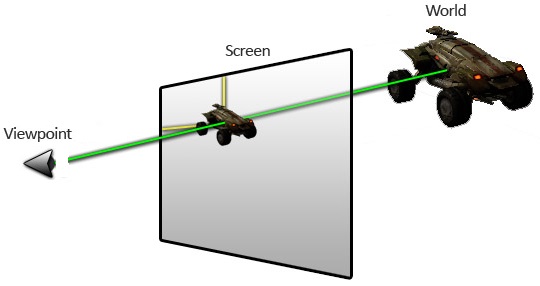
Cartesian coordinates are typically used to represent the world in 3D programming.
-
When creating a window, we must define where is our viewport in the Cartesian system
-
Middle of screen is (0, 0)
-
Dimensions are as follows:
-
x = horizontal
-
y = vertical
-
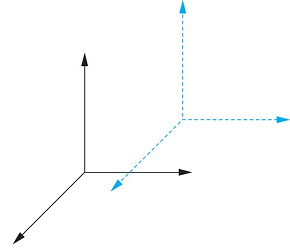
z = depth (can be RHS or LHS)
-
(0, 0, 0) is origin
-